フィジカルAIは、AIの判断をロボットや設備の動作に変え、品質・稼働・安全といった現場成果を直接押し上げる「実世界で動くAI」です。人手不足や技能継承、停止損失、既存設備混在などの制約がROIを左右する業界において、Cレベルの経営幹部の投資判断に必要な定義、優先ユースケース、導入ステップを要点で整理します。
- Gartner client? Log in for personalized search results.

※ご入力は1分程度で完了いたします。
フォームにご記入いただくと、無料でダウンロードできます。
フィジカルAIをはじめ、企業や組織が押さえるべき10のトレンドを整理
2026年、ディスラプション(破壊的変化)はさらに加速し、AI はもはや「あると便利なツール」ではなく、企業の競争力を左右する必須のテクノロジになりました。
2026年版の「戦略的テクノロジのトップ・トレンド」では、AI が前提となるハイパーコネクテッドな世界で、先進企業が「複雑さ」と「新しいチャンス」にどう向き合っているかを示しています。
本eBookにて解説されている10のテクノロジ:
- AI ネイティブ開発プラットフォーム
- AI スーパーコンピューティング・プラットフォーム
- コンフィデンシャル・コンピューティング
- マルチエージェント・システム
- ドメイン特化言語モデル
- フィジカル AI
- 先制的サイバーセキュリティ
- デジタル属性
- AI セキュリティ・プラットフォーム
- ジオパトリエーション
目次
フィジカルAIとは?
フィジカルAIの活用例
フィジカルAIの導入メリットとは?
フィジカルAIの導入課題とは?
フィジカルAIを始める手順
フィジカルAIとは?
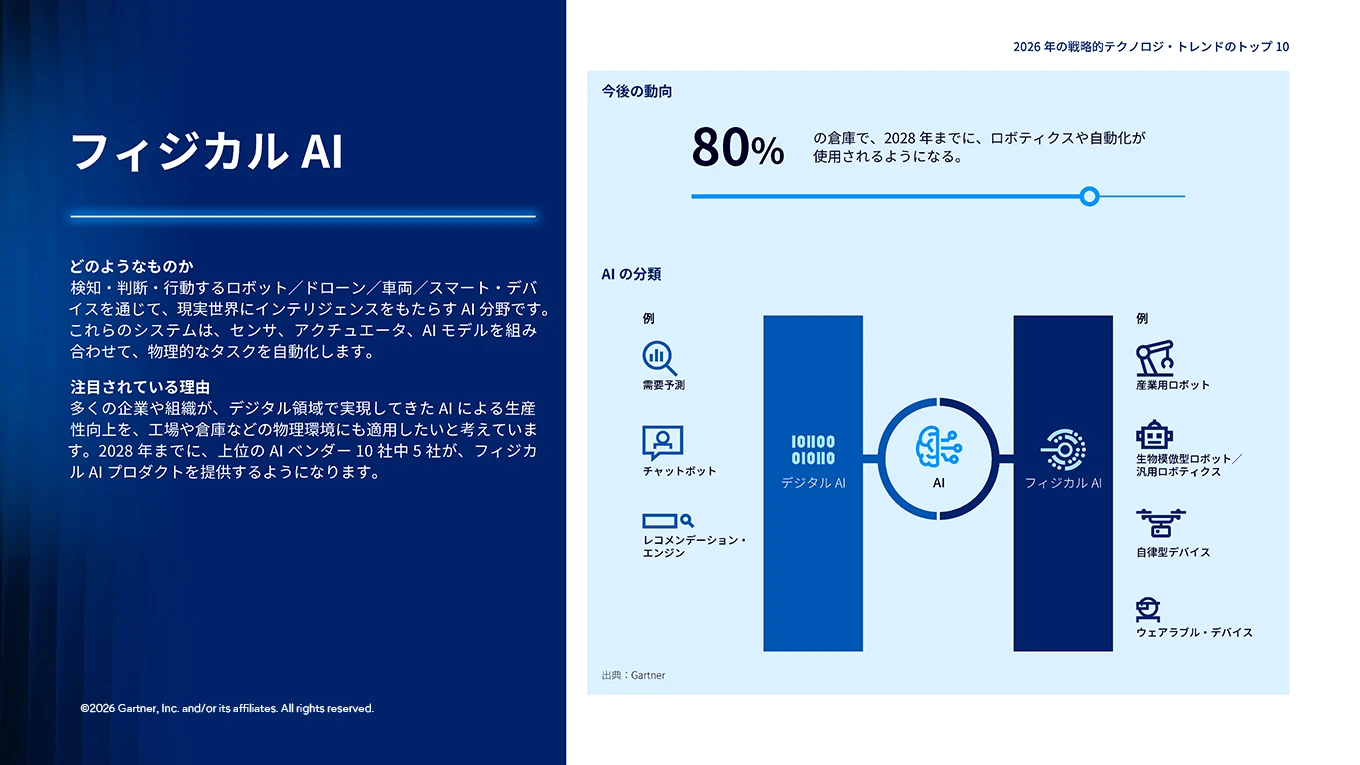
フィジカルAIとは、ロボットや車両、各種機械といった実機に対して、AIがセンサで周囲の状況を捉えながら学習し、自ら判断して装置を動かす(制御する)ための設計・開発のアプローチです。マルチモーダルAIのソフトウェアとハードウェアを、空間情報や物理法則(重力・摩擦・衝突など)と組み合わせることで、現実世界で「周囲を捉え、判断し、動作に移す」を行えるようにします。
フィジカルAIは、2026年の戦略的テクノロジのひとつであり、労働力不足の解消や生産性の向上、危険な作業の代替といった価値をもたらすと予測されています。
従来のAIとの違い
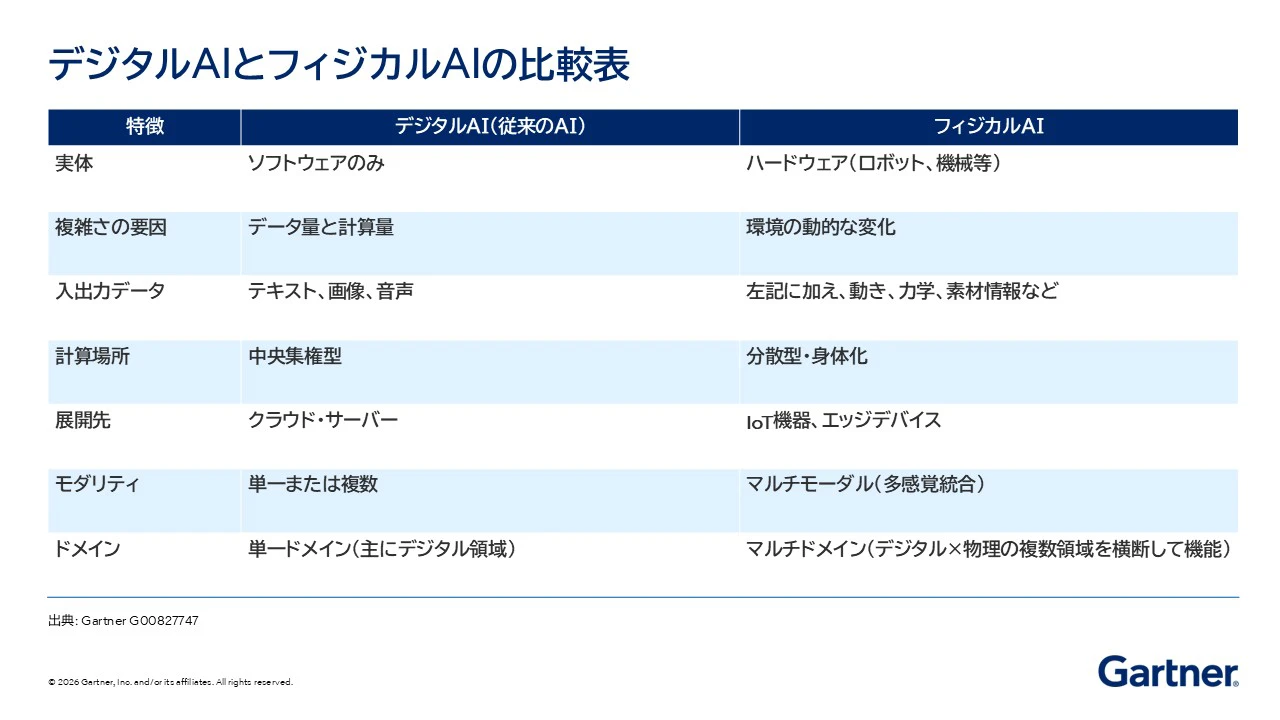
従来のAI(デジタルAI)がテキスト・画像・音声などの入力を中心にデジタル空間で完結していたのに対し、フィジカルAIは音声に加えて、時間(時系列)、空間、物理法則に関するデータなどの多様な感覚情報を取り込み、実世界で知覚・推論・相互作用できる知能へとAIを拡張します。
デジタルAIとフィジカルAIの特徴を比較すると以下のようになります。

{kind=link}
{kind=link}
従来のロボット自動化との違い
従来のロボット自動化は、事前にプログラムされた通りに、決められた手順を正確に繰り返すことが中心でした。フィジカルAIはそこから進んで、環境の変化を感知し、自ら判断して適応します。
つまり、従来のロボットが「決められた作業を正確に繰り返す機械」であるのに対し、フィジカルAIを搭載したロボットは「人間と協働し、学習し続けるエージェント(代理人)」へと進化しています。これにより、ロボットの活用範囲は工場の中から、物流センター、病院、小売店、さらには家庭内といった非構造化された(整理されていない)空間へと劇的に広がることになります。
フィジカルAIの仕組みとは?
フィジカルAIの仕組みは、単なるデータ処理ではなく、「知覚」「認知」「動作」という3つの要素が、リアルタイムかつ連続的なフィードバックループとして機能することにあります
具体的なフィジカルAIの仕組みは以下の3つのポイントから整理できます。
1. コア・メカニズム:リアルタイム・フィードバックループ
フィジカルAIは、ロボットや車のように現実世界で動くAIです。フィジカルAIの仕組みは、単にデータを分析するのではなく、「周囲を捉え(知覚)、判断し(認知)、動き(動作)に移す」をリアルタイムで何度も繰り返すところにあります。この連続的な循環プロセスがフィジカルAIにおける「リアルタイム・フィードバックループ」です。
たとえばロボットがコップをつかむとき、①知覚:カメラやセンサで位置/形/滑りやすさを感じ、②認知:「どの角度で、どれくらいの力でつかむか」を考え、③動作:モーターを動かして実際につかみます。結果が少しずれたり滑ったりすれば、その変化をまたセンサで読み取り、次の動きをすぐ調整します。これがフィードバックループの例です。
2. 学習のメカニズム:シミュレーションと「Sim-to-Real(シム・トゥ・リアル:学習モデルの実機への移行)」
学習は、安全と効率のためにまずシミュレーション(仮想空間)で大量に練習します。仮想空間なら、失敗しても実機のロボット本体や対象物、周囲の設備を壊したり、人に危険が及んだりしません。そこで得た学びを現実の機械に移し、現場で使える精度に近づけます。
3. インフラの仕組み:エッジコンピューティングによる分散処理
さらに、フィジカルAIは「リアルタイム性」が命であるため、通信遅延が許されません。例えば、自動運転車が障害物を避ける判断をクラウド・サーバーに問い合わせていては間に合いません。
そのため、推論(判断)のプロセスは、ロボット本体や現場にあるサーバー(エッジ)で行われます。一方で、膨大な計算リソースを必要とする「モデルのトレーニング」や「シミュレーション」はクラウドや大規模データセンターで行われ、学習済みのモデルがエッジ・デバイスに配信されるという役割分担がなされています。
フィジカルAIにおける強化学習とは?
フィジカルAIにおける強化学習(RL)とは、ロボットや自律システムが環境とやり取りしながら試行錯誤し、「うまく動く方法」つまり動作のルール(制御方針)を自分で学ぶ学習手法です。
人が関節角度や速度を細かく指示するのではなく、AIが「このタスクを達成するには、どの順番で・どれくらいの力で・どの方向に動かすべきか」を報酬(うまくできた度合い)を手がかりに最適化していきます。イメージとしては、身体の動かし方を練習して「運動神経」を鍛えるプロセスです。
ただし現実のロボットで失敗を重ねると、ロボット本体や対象物、周囲の設備を壊したり、人に危険が及んだりする恐れがあります。そこで多くの場合、学習は「物理法則を再現したシミュレーション(仮想空間)」で大量に行い、学んだ動きを実機へ移します(Sim-to-Real)。このとき、摩擦や照明、センサ誤差など「仮想と現実の差」を埋める工夫が重要です。
RLを使うと、床が滑りやすい・物体が未知・風が強いなど条件が変わっても、フィードバックを受けて力加減やバランスを調整しやすくなります。適用例は、ヒューマノイドや四足歩行ロボットの歩行/把持、自律ドローンの障害物回避や視覚ナビゲーションなどです。
フィジカルAIが注目されている背景
フィジカルAIが現在急速に注目を集めている背景には、技術的なブレークスルー、深刻な社会的課題、そして巨額の投資が集まる市場機会という複数の要因が絡み合っています。主に以下の5つの要因に整理することができます:
AI進化の「次のフロンティア」:これまでのAIは主にデジタル空間(テキスト/画像など)で価値を出してきましたが、フィジカルAIは現実世界を認識し、判断し、実際に動いて直接的に行動できる点が新しい領域です。
生成AI × シミュレーションで開発が一気に加速:現実での試行錯誤は危険かつ高コストなので、まず仮想空間で大量に学習します。生成AIによる合成データや、結果を予測する世界モデル、指示から行動につなぐVLAモデル*1 の進展が実用化を早めました。
労働力不足や高齢化への解決策として期待:人間を完全に置き換えるというより、危険/重労働/反復作業を「タスク単位」で肩代わりし、人間が高付加価値業務に集中できるように支援します。倉庫/病院/家庭など予測不能で整理されていない環境でも動けることが重要です。
市場規模の大きさと投資の集中:フィジカルAIは巨大市場になり得るとして資金が集まり、大手テクノロジ企業も基盤モデル/プラットフォーム開発に注力しています。
- ハードウェアとエッジAIの進化:カメラ、LiDAR、触覚センサなどが高度化し、遅延を避けるためのデジタル本体(エッジ)での高度なAI処理も現実的になっています。これが「現場で即判断して動く」要件を支え、実用化を後押ししています。
*1 言語モデル(LLM)の能力を拡張し、視覚(Vision)、言語(Language)、行動(Action)を統合したモデル
フィジカルAIの活用例
フィジカルAIの主なユースケースを業界別に分類したものを以下に説明します。
1. 製造業
主なユースケース:
多機能ロボットによる組立および加工: 従来の単一タスクロボットとは異なり、AIを搭載したロボットアームやコボット(協働ロボット)が、視覚/力覚センサを用いて、溶接、塗装、組立などの複雑なタスクを適応的に実行
「ライトアウト(完全無人)」工場の実現: 人間の介入なしに24時間365日稼働する自動化工場。ロボットがロボットを製造するような高度な自律生産システム
- 品質管理と予知保全: 視覚センサとAIを用いて製品の欠陥をリアルタイムで検出し、設備の故障を予測してダウンタイムを防ぐ
2. 物流・倉庫
主なユースケース:
自律移動ロボット(AMR)とピッキング: 倉庫内を自律的にナビゲートし、棚から物品を取り出し、梱包エリアまで搬送する。人間や他のロボットと協調して動く
在庫管理ドローン: 倉庫内を飛行し、RFIDや画像認識を用いて在庫の棚卸しを自律的に行う
- サプライチェーンの最適化: トラックのルート最適化や、需要予測に基づく在庫配置の自動化
3. 移動体・屋外現場オペレーション(自動車、農業、建設・鉱業)
主なユースケース:
自動運転車(乗用車・トラック): 複雑な交通状況を認識し、人間なしで走行するロボタクシーや長距離トラック輸送
スマート農業: ドローンや自律トラクターによる作物のモニタリング、種まき、収穫、除草の最適化
- 建設・採掘の自動化: 危険な環境での自律的な掘削、資材運搬、ロボットによるレンガ積みや現場監視
4. エネルギー/公益事業
主なユースケース:
インフラ点検: ドローンやロボットを用いた送電線、パイプライン、風力タービンの自律点検。画像AIによる欠陥検出
スマートグリッド制御: センサ・データに基づき、需給バランスをリアルタイムで自律調整し、電力の流れを混雑・故障箇所から別ルートに振り分けて停電を防ぐ
- 危険区域の監視: 原子力発電所や化学プラントなど、人間が立ち入るのが困難なエリアでの自律監視
5. 医療
主なユースケース:
手術支援ロボット: AIが解剖学的データをリアルタイムに分析し、外科医の手の震えを補正したり、外科医の指示・監督のもとで縫合の一部を自動化したりする
院内物流ロボット: 薬剤、検体、リネン類を自律的に搬送し、看護師の負担を軽減する
- 患者モニタリングとケア: ウェアラブル端末やカメラで、心拍数・呼吸数・体温・血中酸素濃度などの体調指標を常時監視し、異常時にアラートを出す。また、高齢者の話し相手や見守りを行うソーシャルロボットも活用する
※ご入力は1分程度で完了いたします。
フォームにご記入いただくと、無料でダウンロードできます。
フィジカルAIの導入メリットとは?
フィジカルAIを導入することで、企業は従来のデジタルAIや単純なロボット自動化では実現できなかった、物理世界における高度な課題解決と価値創出が可能になります。
主要な導入メリットは以下の通りです:
1. 労働力不足の解消と従業員の安全性向上
フィジカルAIは、危険、過酷、または反復的なタスクを自動化することで、深刻化する労働力不足への対策となります。
タスクの代替: 人間を完全に置き換えるのではなく、肉体的にきつい作業や危険な作業をロボットが肩代わりし、人間はより創造的で認知的な業務に集中できるようになります
安全性: 建設現場や化学プラントなどの危険な環境において、人間が立ち入ることなく自律的に点検や作業を行うことで、労働災害のリスクを大幅に低減します
2. 生産性と業務効率の飛躍的向上
24時間365日稼働可能なフィジカルAIは、人間の限界を超えた効率を実現できます。
継続的な稼働: 休憩や交代を必要とせず、夜間や休日でも稼働し続けることで、処理能力を最大化します
最適化: 物流倉庫での自律移動ロボット(AMR)によるピッキングルートの最適化や、スマート農業における肥料・水やりの精密管理など、データに基づいた最適な行動により、無駄を削減しコストを抑えます
3. 予測不能な環境への適応と柔軟性
従来のロボットが決まった動きしかできなかったのに対し、フィジカルAIは予測不能な環境でも自律的に判断して動くことができます。
動的な対応: 工場内での部品の位置ズレや、倉庫内で人が飛び出してくるような状況でも、センサで環境を認識し、衝突を避けてタスクを継続できます
多機能性: 特定の単一タスクだけでなく、ソフトウェアの更新や生成AIによる指示理解を通じて、組立、搬送、清掃など多様なタスクに柔軟に対応できる「多機能ロボット」の導入が可能になります
4. リアルタイムでの意思決定と品質向上
クラウドにデータを送って判断を仰ぐのではなく、現場(エッジ)で瞬時にデータを処理し判断することで、品質とスピードを向上させます。
低遅延: 自動運転車や手術支援ロボットのように、コンマ数秒の遅延が許されない状況でも、エッジAIにより即座に安全な判断を下せます
品質管理: 製造ラインにおいて、高解像度カメラとAIを用いて製品の欠陥をリアルタイムで検出し、不良品の流出を防ぐとともに、トレーサビリティを確保します
5. 新たなビジネスモデルと価値の創出
フィジカルAIは既存業務の効率化だけでなく、全く新しいサービスや収益源を生み出す可能性を秘めています。
自律配送/移動サービス: ロボタクシーやドローン配送といった、無人化による低コストな移動や物流サービスが実現します
高齢者ケア: 自律的な見守りや家事支援を行うソーシャル・ロボットにより、高齢化社会における新たなケアサービスを提供できます
このように、フィジカルAIの導入は、単なる自動化を超えて、「物理的な制約からの解放」と「デジタル知能の物理世界への適用」による抜本的なビジネス変革をもたらします。
※ご入力は1分程度で完了いたします。
フォームにご記入いただくと、無料でダウンロードできます。
フィジカルAIの導入課題とは?
フィジカルAIの導入は、デジタル空間で完結するAIとは異なり、「物理的な実体」を伴うがゆえの固有かつ深刻な課題に直面します。デジタルAIの失敗がデータの誤りであるのに対し、フィジカルAIの失敗は物理的な損害、安全性への脅威、および人命に関わるリスクに直結するため、ハードルは極めて高くなります。
主な導入課題を以下の4つのカテゴリーに整理することができます。
1. 技術的な複雑さと「Sim-to-Real」ギャップ
フィジカルAI最大の実装課題は、学習環境(シミュレーション)と現実世界(リアル)の乖離を埋めることです。
Sim-to-Realギャップ: AIモデルは主に仮想空間(シミュレーション)でトレーニングされますが、現実世界には摩擦、照明の変化、天候、通信の遅延など、シミュレーションでは完全に再現しきれない物理的なノイズが無数に存在します。このギャップにより、シミュレーションでは完璧に動作したロボットが、現実では期待通りに動かないという問題が発生します。
データの希少性: テキストや画像データが豊富なデジタルAIとは異なり、ロボットの動作や物理的な相互作用に関する高品質なトレーニングデータは不足しています。企業固有の独自のデータが必要となるため、インターネット規模のデータセットを利用することが困難です。
リアルタイム性の絶対要件: 自動運転車や産業用ロボットは、ミリ秒単位での判断が求められます。クラウドへの通信遅延は許容されないため、高度な処理をデバイス本体(エッジ)で行う必要があり、計算能力と消費電力のバランスを取るのが技術的に困難です。
2. 安全性とセキュリティ(CPSセキュリティ)
フィジカルAIはサイバー空間の脅威を物理空間の被害に変換してしまうリスクがあります。
キネティック・リスク(物理的損害): AIの誤判断や誤作動が、設備の破壊、環境汚染、あるいは人間の負傷や死亡に直結する可能性があります。
新たな攻撃対象: AIを搭載したドローンやロボットが悪用されるリスクや、GPSのなりすましにより自律移動システムが乗っ取られるリスクが高まります。また、AIモデル自体が「ブラックボックス」であるため、なぜその危険な動作を選択したのかを事後検証(監査)することが難しいという課題もあります。
- セキュリティの仕様へ欠如: 市場投入スピードが優先され、セキュリティが後回しにされる傾向があり、脆弱性が組み込まれたまま展開されるリスクがあります。
3. ハードウェアとインフラの制約
ソフトウェアだけでなく、物理的なハードウェアの制約が導入の足かせとなります。
高コスト: 産業用グレードのセンサ(LiDARなど)、アクチュエータ、およびエッジコンピューティング機器の導入コストは依然として高額です。
ハードウェアの耐久性と寿命: 物理的なデバイスは摩耗し、バッテリー寿命の制約を受け、過酷な環境(温度、振動、塵埃)に耐える必要があります。
- インフラの整備: リアルタイム通信のための5Gプライベート・ネットワークや、エッジデータセンターの設置など、物理的なインフラストラクチャへの投資が不可欠です。
4. 組織・ガバナンスと社会的課題
技術以外の面でも、既存の組織構造や法規制が障壁となります。
IT/OTの統合: 情報技術(IT)部門と運用技術(OT)部門は、組織文化や優先順位(セキュリティ対可用性など)が異なるため、両者の連携不足がプロジェクトの遅延や失敗を招く可能性があります。
スキル不足: AI、ロボット工学、データサイエンス、および現場の運用知識を横断的に理解できる人材が圧倒的に不足しています。
規制と法的責任: 自動運転車が事故を起こした場合の責任の所在(メーカーか、AIか、所有者か)など、法的な枠組みが未整備です。また、公共空間でのカメラやセンサの使用に対するプライバシーへの懸念や社会的受容性も課題です。
フィジカルAIの導入は、単なる「新技術の採用」ではなく、「物理的リスクの管理」と「組織能力の変革」を伴う経営課題です。 成功のためには、デジタルツインを活用した徹底的なシミュレーション、エッジでのリアルタイム処理能力の確保、そしてITとOTが融合した組織横断チーム体制の構築が不可欠とされています。
フィジカルAIを始める手順
フィジカルAIの導入を成功させるには、従来のデジタルAIとは異なるアプローチが必要です。物理的な世界での安全性、リアルタイム性、およびハードウェアとの統合が求められるためです。
フィジカルAIを始めるための主要な手順を以下の6つのステップにまとめます。
1. 戦略的コミットメントとユースケースの特定
フィジカルAIは単なる技術導入ではなく、ビジネスモデルの変革を伴います。まずは経営層レベルでの戦略的な意思決定が必要です。
戦略的投資の決断: フィジカルAI市場への参入や導入を、長期的な競争優位性を左右する戦略的優先事項として位置づけ、必要な投資とパートナーシップをコミットします。
高価値ユースケースの選定: 労働力不足の解消、従業員の安全向上、または人間を高付加価値な業務へシフトさせることができる領域(危険な作業、反復作業など)を特定します。
成果の定義: 自律化によってどのようなビジネス価値(コスト削減、生産性向上、新しいサービス・モデルなど)を生み出すかを明確にします。
2. インフラストラクチャとアーキテクチャの整備
物理世界でのリアルタイムな判断を実現するために、ITインフラを見直す必要があります。
エッジAIの導入: クラウドへの通信遅延は許されないため、デバイス本体(オンデバイス)や現場(オンプレミス)で推論を実行できるエッジAIインフラを構築します。これには、マイクロデータセンターやAIチップ搭載デバイスの配備が含まれます。
分散型・モジュール型アーキテクチャ: 複数のAIエージェントが連携し、センサ入力と物理的な動作(アクチュエーション)を統合するためのモジュール型アーキテクチャを採用します。
データパイプラインの構築: センサデータの収集、トレーニング用データへの変換、モデルの更新と配信を行うための、エッジとクラウドを繋ぐ堅牢なデータライフサイクル管理基盤を整備します。
3. AIモデルの開発と選定
汎用的な能力と、特定のタスクに特化した能力のバランスを取る必要があります。
基盤モデルの活用: 視覚・言語・行動を統合した「VLAモデル」や、ロボット向けの基盤モデルを採用し、ゼロから開発する手間を省きます。
汎化と特化のバランス: 大規模な事前学習済みモデル(汎化)をベースにしつつ、自社の特定のタスクや環境に合わせてドメイン固有データでファインチューニング(特化)を行います。
世界モデル(World Models)の検討: 物理法則や因果関係を理解し、将来の状態を予測できる「世界モデル」の導入を検討し、AIの計画能力と適応力を高めます。
4. シミュレーションによる学習と検証(Sim-to-Real)
現実世界での試行錯誤はリスクが高いため、仮想空間での開発が必須となります。
シミュレーション・ファースト: 高精度の物理シミュレーターやデジタルツイン環境を構築し、開発の主戦場とします。これにより、現実世界では不可能な速度と規模でAIをトレーニングできます。
合成データの活用: 現実では滅多に起きない事故や異常気象などの「コーナーケース」を含むトレーニングデータを人工的に生成し、AIの対応力を強化します。
仮想空間での検証: 物理的なプロトタイプを作る前に、仮想環境で徹底的なテストと検証を行い、安全性と信頼性を確認します。
5. パイロット導入と段階的展開
小さく始めて、現実世界からのフィードバック・ループを回しながら拡大します。
制御された環境でのパイロット: 倉庫や工場の一部など、管理された環境でパイロットプロジェクトを開始し、システムの挙動を確認します。
多機能ロボットの活用: 単一タスク専用機ではなく、ソフトウェアの更新で多様なタスクに対応できる多機能ロボットの導入を検討し、柔軟性を確保します。
- 継続的な改善: 稼働データ(センサ・データ)を収集し、モデルの再トレーニングに活用することで、運用しながら精度と自律性を向上させるループを確立します。
6. 組織・ガバナンスと安全性の確立
技術だけでなく、組織体制とルールの整備が不可欠です。
組織横断チームの結成: IT部門、OT(運用技術)部門、AIエンジニア、ロボット工学の専門家、および安全管理部門が一体となったチームを編成します。
安全と倫理のガバナンス: 物理的な危害を防ぐための安全設計を徹底し、AIの誤動作やサイバー攻撃(CPSセキュリティ)に対する防御策を講じます。
- 人材育成: ロボットと協働するための新しいスキルセットを従業員に教育し、人間とAIが協力する文化を醸成します。
※ご入力は1分程度で完了いたします。
フォームにご記入いただくと、無料でダウンロードできます。
フィジカルAIに関するリサーチノート
※本ページはGartnerご契約者様向けです。フィジカルAIの関連リサーチは新規公開・更新が継続的に追加されます。ご契約のお客様は、関連するリサーチノートから詳細をご確認いただけます。
なぜ「エッジ」が最初の分岐点になるのか?
- フィジカルAIは現場で動く。まずエッジ設計で遅延と運用を固める
フィジカルAIはクラウドだけでは成立しません。低遅延・耐障害・コスト・OT連携を前提に、どこで推論しどこで学習するかを設計します。
関連リサーチ(ID):
Hype Cycle for Edge Computing, 2025(G00831809):エッジ技術の成熟度と採用の見取り図
Innovation Insight: IT Infrastructure for Physical AI(G00836943):フィジカルAIを支えるI&O基盤要件(低遅延・現場実装・OT連携)
Executive Briefing on Emerging Technology: Smart Robots(G00832982):ロボット × AIの導入論点をエグゼクティブ向けに要点整理
Emerging Tech: AI Vendor Race: Enable Physical AI With Real-Time, Multisensory Capabilities(G00811278):リアルタイム × 多感覚(マルチセンサ)で差がつく競争軸
シミュレーションは「PoC」ではなく、なぜ「基盤」なのか?
- 失敗できない現場ほど、先にシミュレーションで学習と検証を回す
現実データが揃うのを待つと進みません。デジタルツインや高精度シミュレーションで、精度・安全性・再現性を短サイクルで高めます。
関連リサーチ(ID):
Emerging Tech: World Models Build on Simulations to Unlock Unprecedented Physical AI Opportunities(G00833095):シミュレーション投資と“次の基盤”の位置づけ
Emerging Tech: Adoption Trends for Hyper-synthetic Data in Simulation, Spatial Imaging and Digital Twins(G00827752):シミュレーション/デジタルツインでの検証を進める実務トレンド
- Emerging Tech: Physical AI Advances Intelligence in the Real World(G00827747):現実世界で動くAIの設計思想と検証観点
合成データは、どこで効くのか?
- 影響度の大きい例外ケースを含む希少事象は合成データで増やし、網羅的に検証する
事故・異常・危険作業は実データが不足しがちです。合成データでカバレッジを補い、学習だけでなくテストケース拡張にも使います。
関連リサーチ(ID):
Emerging Tech: Adoption Trends for Hyper-synthetic Data in Simulation, Spatial Imaging and Digital Twins(G00827752):高精度の合成データ活用(学習+検証の両面)
- Emerging Tech Impact Radar: Physical AI(G00830457):合成データを含むフィジカルAI技術群の成熟度・影響を俯瞰
ワールドモデルは、何を変えるのか?
- 世界を予測できるワールドモデルが、汎化と自律性を押し上げる
シミュレーションの次は“世界の振る舞い”の学習です。「予測」「計画」「行動」のループを強化し、未知環境でも安定して動ける範囲を広げます。
関連リサーチ(ID):
Emerging Tech: World Models Build on Simulations to Unlock Unprecedented Physical AI Opportunities(G00833095):シミュレーションからワールドモデルへ(短中期/長期の狙い)
Emerging Tech: Physical AI Advances Intelligence in the Real World(G00827747):ワールドモデルを含む“現実対応の知能”の要点整理
「動くAI」のガバナンスは、どこから始めるべきか?
- 動くAIは失敗が事故になる。ガバナンスを設計に組み込む
安全・品質・停止・責任を前提に、検証・監視・権限制御・セキュリティをセットで整備します。PoCの段階から運用基準と検証手順を決めるのが重要です。
関連リサーチ(ID):
Top Strategic Technology Trends for 2026: Physical AI(G00829646):フィジカルAIの定義・価値・導入の注意点(意思決定の起点)
Emerging Tech Impact Radar: Physical AI(G00830457):採用順序の議論に使える“技術マッピング”
Predicts 2026: Emergent Critical Risks of AI in CPS Security(G00841645):CPS領域でのAI起因リスク(“守り”の必読)
- Innovation Insight: IT Infrastructure for Physical AI(G00836943):運用・OT連携を含む統制の論点(I&O視点)
市場はどこに向かっている?投資はどこに集まる?
- 資金の流れを見ると、成熟の速い領域と勝ち筋が見える
技術論だけでは優先順位が決めにくいときは、投資動向がヒントになります。資金が集まる領域=実装可能性と需要が高い領域です。
関連リサーチ(ID):
Emerging Tech: Top-Funded Startups in Physical AI(G00835933):投資動向からフィジカルAIの有望領域を俯瞰
ガートナー・コンファレンスに
ご参加ください
ガートナーの各種コンファレンスでは、CIOをはじめ、IT投資、導入、運用管理にかかわるすべての意思決定者に最新・最適な情報とアドバイス、コミュニティを提供します。
